🗺 Odometry
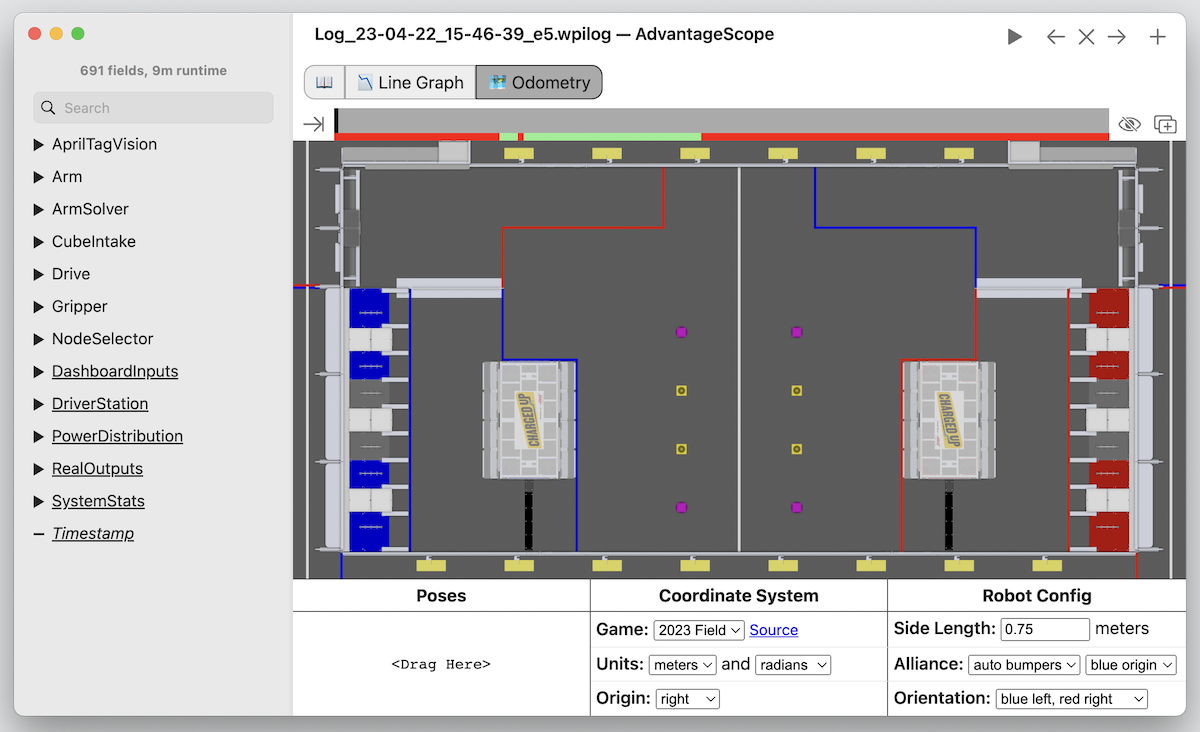
The odometry tab shows a 2D visualization of the robot overlayed on a map of the field. It can also show extra data like vision targeting status and reference poses. The timeline shows when the robot is enabled and can be used to navigate through the log data.
Note: To view the odometry visualization alongside other tabs, click the "Add Window" icon just below the navigation/playback controls. To hide the controls at the bottom of the window, click the eye icon.
Pose Data
To add a field with pose data, drag it from the sidebar to the box under "Poses" and use the drop down to select an object type. Multiple sets of objects can be added this way, and fields can be included multiple times. To remove a set of objects, right-click the field name.
Multiple poses are typically shown as duplicate objects, except for trajectories (where each pose is a point along the trajectory). The origin and units are configurable.
Structured Format
Pose data can be stored as a byte-encoded struct or protobuf. The following data types are supported:
Pose2dTranslation2dTransform2dTrajectory
The example code below shows how to log pose data using WPILib or AdvantageKit.
Pose2d poseA = new Pose2d();
Pose2d poseB = new Pose2d();
// WPILib
StructPublisher<Pose2d> publisher = NetworkTableInstance.getDefault()
.getStructTopic("MyPose", Pose2d.struct).publish();
StructArrayPublisher<Pose2d> arrayPublisher = NetworkTableInstance.getDefault()
.getStructArrayTopic("MyPoseArray", Pose2d.struct).publish();
periodic() {
publisher.set(poseA);
arrayPublisher.set(new Pose2d[] {poseA, poseB});
}
// AdvantageKit
Logger.recordOutput("MyPose", poseA);
Logger.recordOutput("MyPoseArray", poseA, poseB);
Logger.recordOutput("MyPoseArray", new Pose3d[] {poseA, poseB});
WPILib's Field2d class can also be used to log several sets of pose data together. Note that Field2d publishes rotations in degrees instead of radians; use the configuration at the bottom of the screen to adjust the units.
Legacy Format
Alternatively, pose data can be stored as a numeric array describing one or more 2D poses with the following format:
[
x, y, rot,
x, y, rot,
...
]
The rotation must be CCW+, and the units (radians/degrees) are configurable.
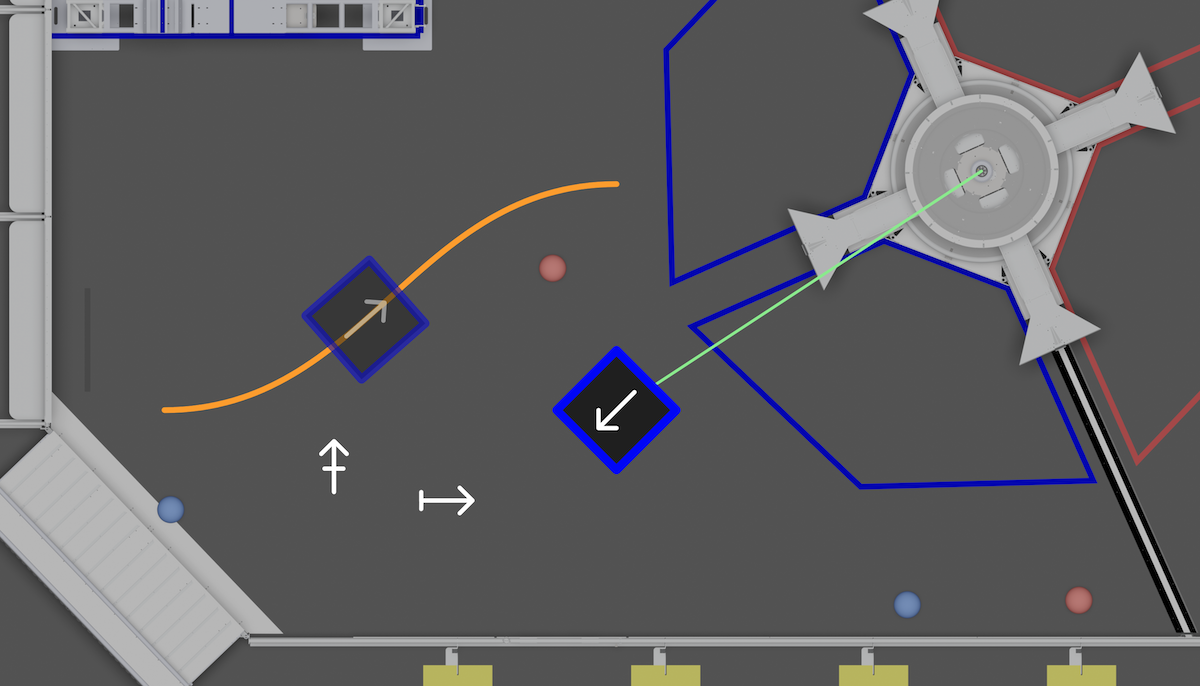
Objects
The following objects are supported:
- Robot
- Ghost
- Trajectory
- Vision Target
- Heatmap
- Arrow (Front/Center/Back)
- Zebra Marker (see Loading Zebra MotionWorks™ Data)
Note: The robot pose is always centered on the robot. The crossbar on the arrow indicates the location of the pose (at the front, center, or back).
Configuration
The following configuration options are available:
- Game: The field image to use, defaults to the most recent game. To add a custom field image, see Custom Assets.
- Units: The linear and angular units of the provided fields. Meters, inches, radians, and degrees are supported.
- Origin: The location of the origin (0, 0) on the field, relative to the robot's alliance wall. The default option (right) aligns with the WPILib coordinate system, and places the origin at the bottom left when looking at the field in its default orientation.
- Side Length: The side length (track width) of the robot in the selected linear units. The robot is always rendered as a square.
- Alliance (Bumpers): The color of the robot's bumpers, set independently of the field origin. "Auto" will select the alliance color based on the available log data.
- Alliance (Origin): The position of the field origin, on the blue or red alliance wall. "Auto" will select the alliance color based on the available log data.
- Orientation: The orientation to use when displaying the field, useful when aligning to a match video or testing field oriented controls.
Note: Automatic selection of alliance color may be inaccurate when viewing log data produced by AdvantageKit 2023 or earlier.